



Main features
- Type of movement: high precision and repeatability, interpolation along all three axes, and speed are its main characteristics.
- Structure: the rigidity of the structure, due to linear guides, makes it easy to follow a precise path.
- Versatility: the modularity and high level of customization allow the designer to meet a wide range of production and applications needs.
- Easy integration: cartesian robots are extreme reliable and integrate well with vision systems or sensors enhancing their ability to perform complex tasks.
When choosing a Cartesian robot several factors should be taken into account:
– Load capacity, speed and precision: it is necessary to ensure both the management of the weight of the material and equipment to be manipulated and the achievement of cycle times and the required work;
– Dimensions: combining the length of each individual axis to achieve the desired trajectory of the object is crucial.
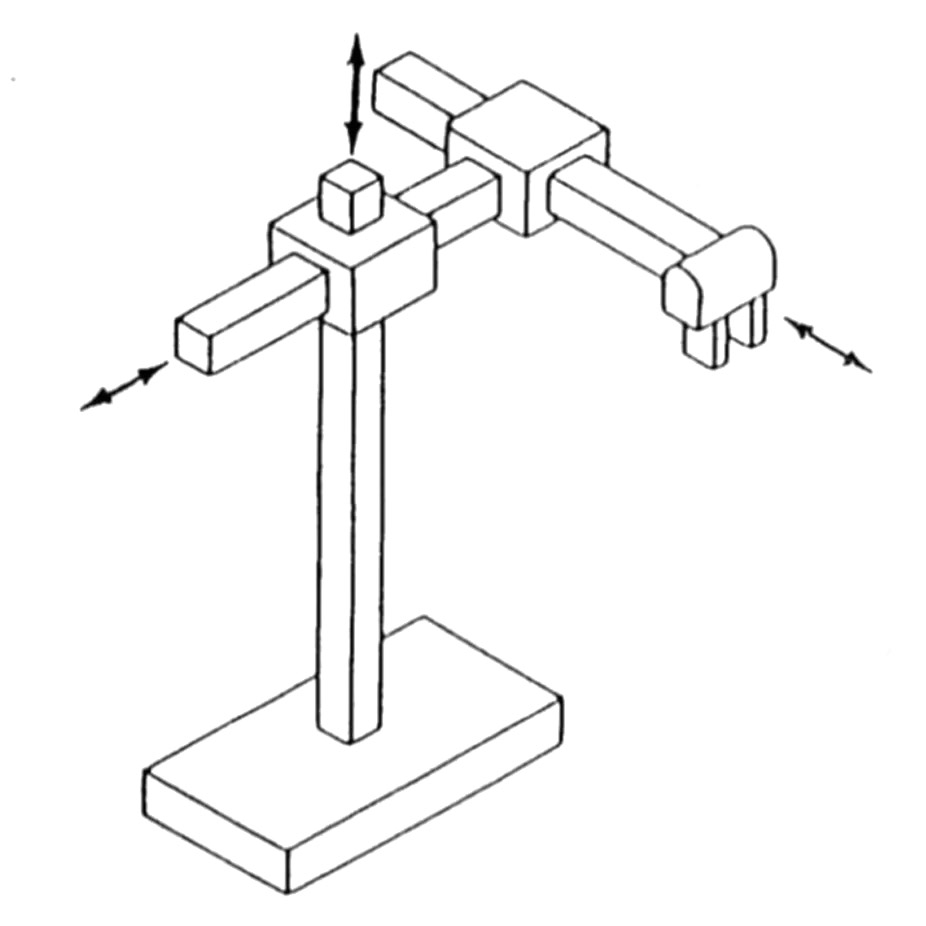
Working area

The workspace of Cartesian robots is a parallelepiped (a rectangle in a plane) which allows complete access to the occupied footprint without dead spaces unlike other more articulated types of robots.
Moreover the interpolation of the position of the motors of the different axes involved in the system is not essential to determinate the position of the end effector in space.
Configurations
Cartesian robots are uniquely configured for each application, but their design is scalable without significant difficulty.
The different 3-axis configurations are obtained from the combination of various 2-axis combinations such as XYB-XYS-XZ-YZ

XYB: Y axis mounted on the slide of the X axes
4 configurations based on the mounting direction
XYS: X axis and Y axis both mounted slide-slide
4 configurations based on the mounting direction


XZ: Z axis mounted on the slide
of the X axis via the base
YZ: Z axis mounted on the slide
of the Y axis via the base


XYG: Y axis mounted on the slide
of the X axis and another one parallel to it
Application’s fields
The Cartesian robot is used in the field of automated assembly, pick&place, fluid dispensing, palletizing/depalletizing, loading/unloading operations, packaging and all activities that required precise positioning.
Our “machinery” fleet
IAI
The IAI Cartesian robots come in many variations, as many as the types of axes, based on their mechanical and kinematic characteristics and their mounting relative to each other.
It is worth mentioning that IAI provides a “turnkey” products, meaning a robot obtained by combining electric axes in various types, equipped with pre-parameterized motorization and control logic for the specific actuator, including fixing brackets and cable carriers.