



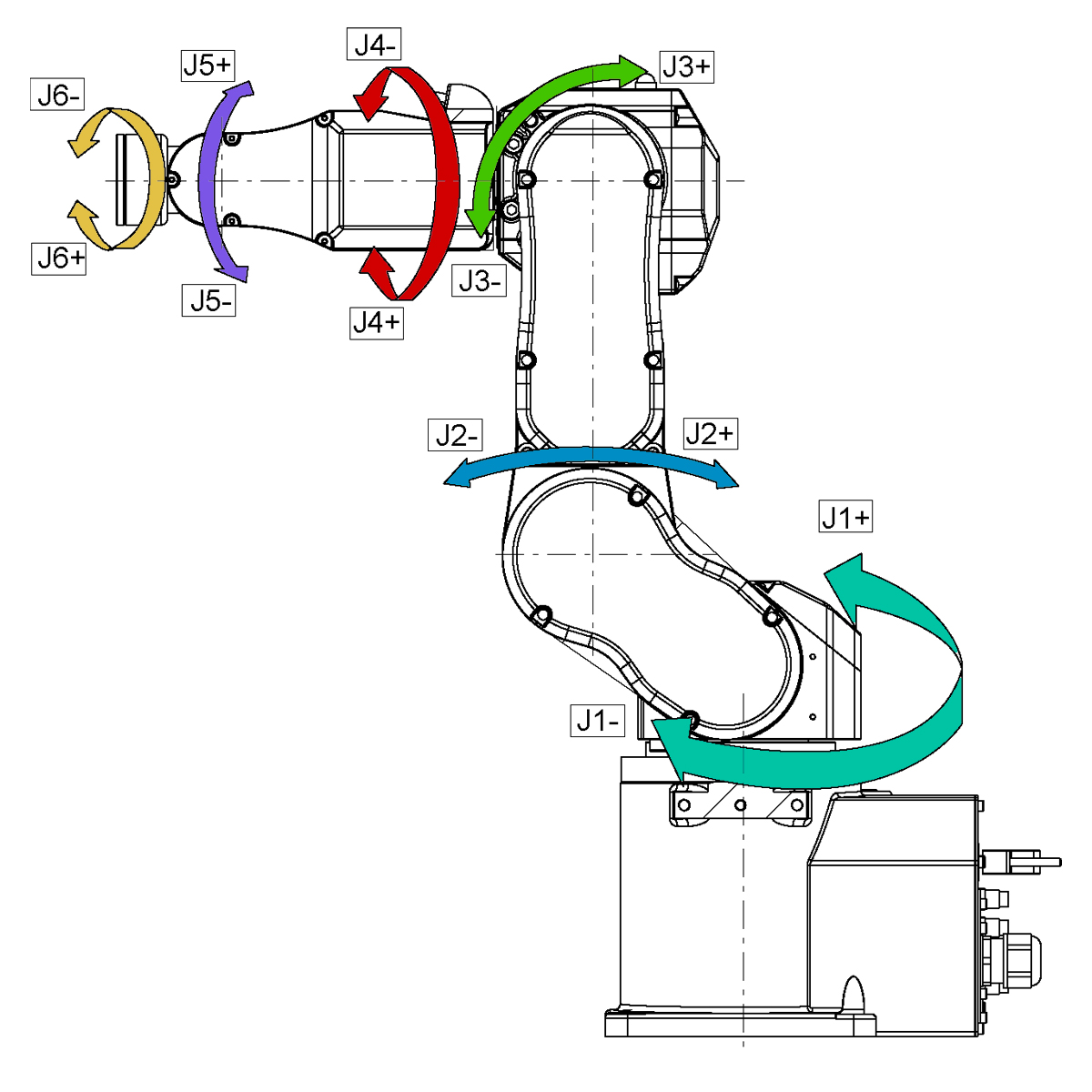
Caratteristiche principali
- Estrema mobilità articolare
- Ampio spazio di lavoro unito a dimensioni compatte
- Capacità di resistere ad ogni tipo di ambiente
- Capacità di realizzare un’ampia varietà di compiti, grazie anche alle elevate precisioni e velocità
Il robot antropomorfo va scelto tenendo conto di alcune caratteristiche:
- Compito richiesto: la prima cosa da considerare è il compito che si desidera che il robot esegua. Questo influirà sulla scelta del tipo e della configurazione del robot, dei sensori e delle altre componenti richieste.
- Capacità di movimento: lo sbraccio del robot, il carico al polso e la velocità massima di movimento in base al carico applicato nonché la precisione sono fattori fondamentali da considerare per eseguire il compito specifico.
- Affidabilità e manutenzione: importanti perché influiscono sulla capacità di eseguire compiti in modo efficiente ed efficace.
- Supporto e servizio post-vendita: influiscono sulla facilità di utilizzo e sul mantenimento del robot nel tempo.
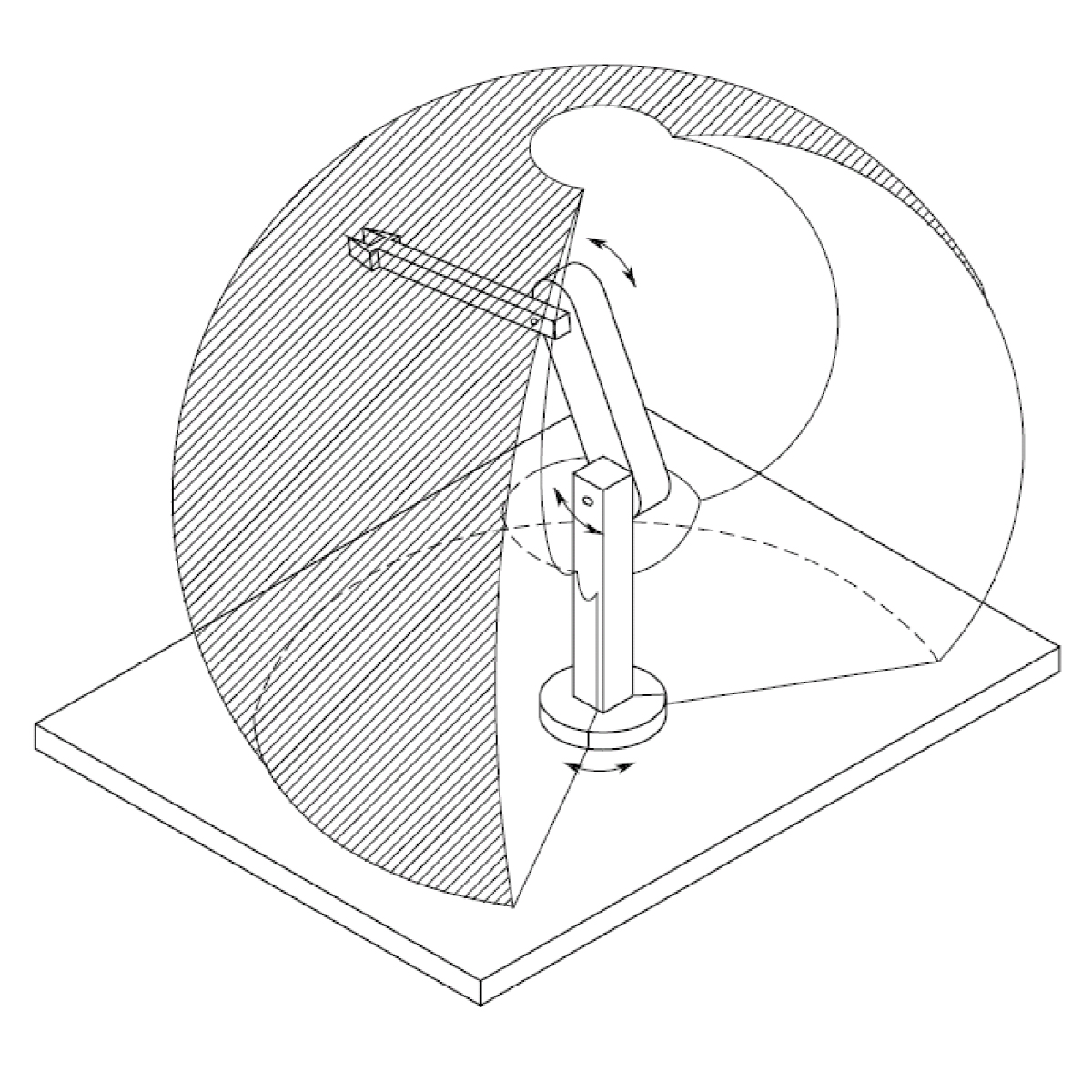
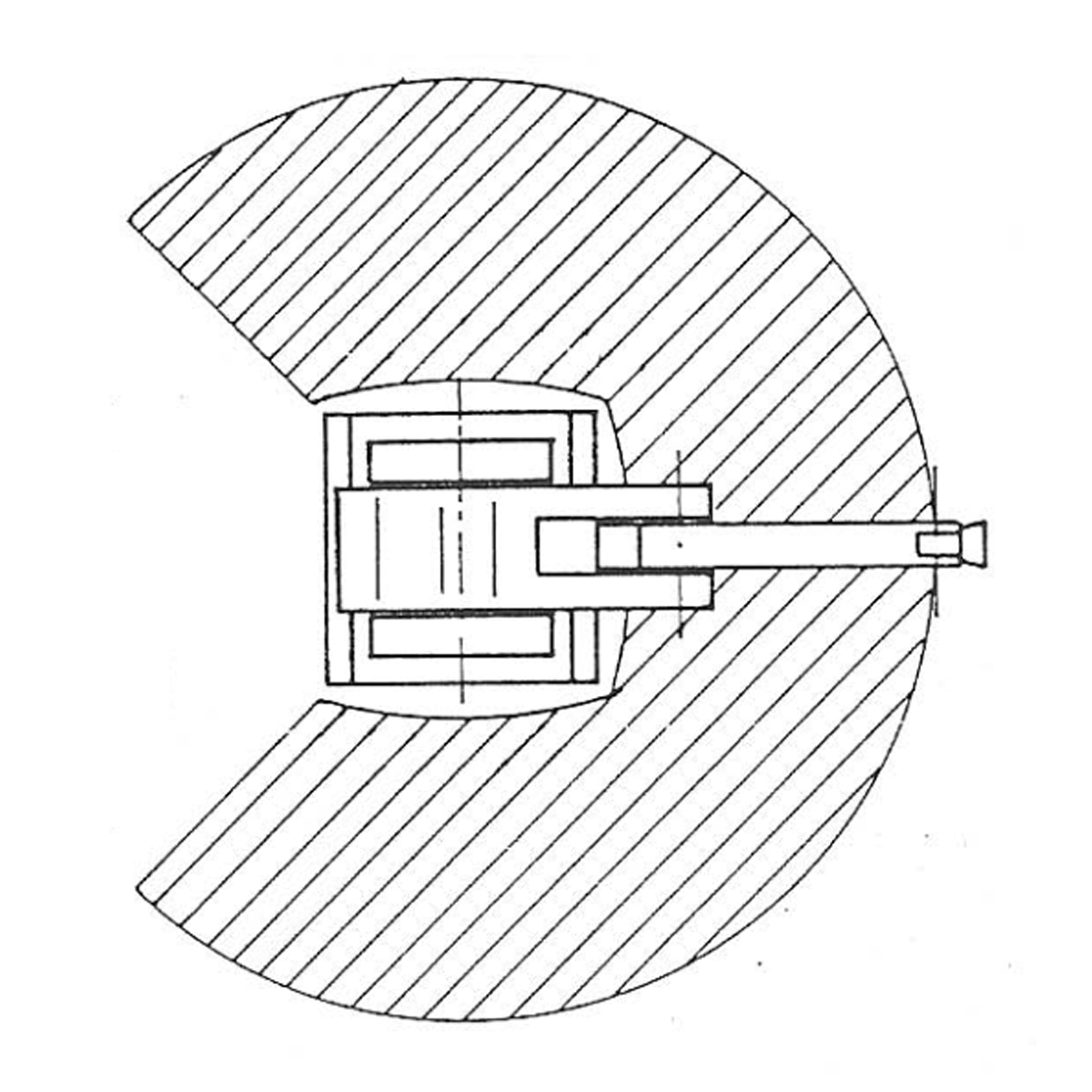
Area di lavoro
L’area di lavoro di un robot antropomorfo è estremamente ampia dato il minimo ingombro al suolo ed il suo andamento “quasi” sferico nello spazio.
Configurazioni
Il robot antropomorfo ha la possibilità di essere montato sia tabletop che a parete o a soffitto: normalmente ha una protezione IP54/65 a seconda del modello e ovviamente va scelto in modo idoneo all’ambiente di lavoro in cui deve operare.
Campi di utilizzo
Movimentazione e manipolazione nelle sue più svariate forme applicative: asservimento macchine, assemblaggio, collaudo, confezionamento, riempimento, taglio, lucidatura, sbavatura, saldatura, imballaggio e via dicendo.
Il nostro parco macchine
NACHI
I robot antropomorfi NACHI sono declinati in molteplici taglie e tipologie, sia a livello di carichi sopportati che di settori di impiego: da 1 a 1000Kg:
– serie MZ, con controller compatto, veloce, agile e precisa, porta carichi da 1 a 70kg;
– serie MC, con controller tradizionale, porta carichi da 20 a 1000kg;
– serie MR, con controller tradizionale e 7 assi, porta carichi da 20 a 50kg;
– serie LP, a 4 assi e pensata appositamente per applicazioni di pallettizzazione;
– serie SRA, pensata appositamente per la saldatura a punti.
EPSON
I robot antropomorfi EPSON sono pensati per una manipolazione medio piccola da 1 a 12kg:
-serie C, veloce, agile e precisa:
– serie VT, con controller integrato e la più economica;
– serie N, produttività massima per la compattezza e la rotazione a 360°.