



Azionamenti elettrici motorizzati, brushless, corse e sezioni variabili, trasmissioni a vite o a cinghia

ROBOCILINDRI
Cilindri elettrici alternativi a quelli pneumatici, facili da usare, flessibili ed economici

ROBOT ANTROPOMORFI
Robot a 6 assi e 6 gradi di libertà, movimento complesso simile a quello umano, sbraccio e carico al polso variabile
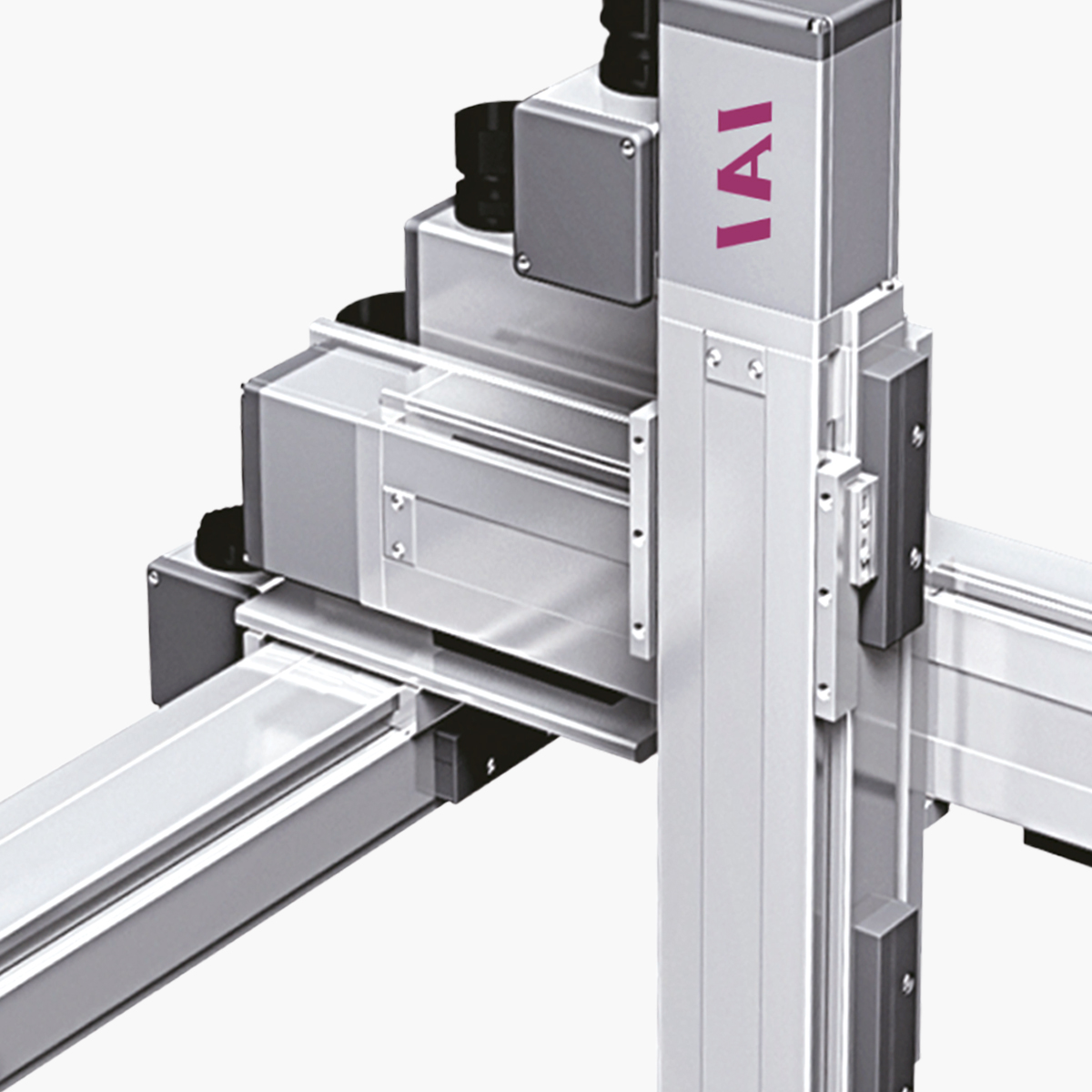
ASSI CARTESIANI
Combinazione di 2 o più assi elettrici motorizzati in un sistema nel piano XY o nello spazio XYZ in configurazioni variabili, staffe incluse ed eventuali catene portacavi

ROBOT COLLABORATIVI
Robot a 6 assi in grado di lavorare in sicurezza con l’essere umano, sbraccio e carico variabile, sistema di visione incluso, facili da programmare
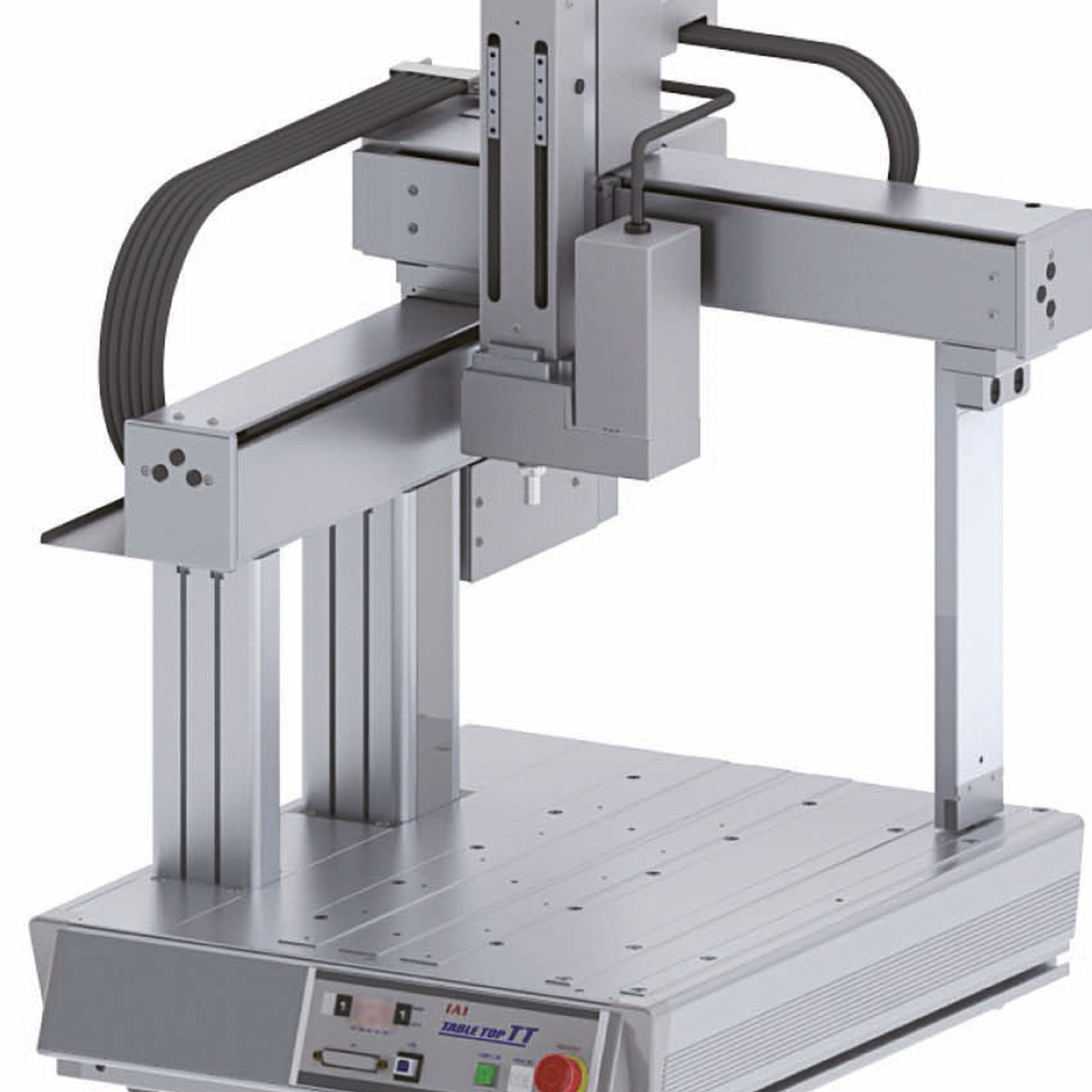
ROBOT DA TAVOLO
Una base rettangolare estremamente rigida su cui si innesta un sistema cartesiano a carroponte o a sbalzo, diverse aree di lavoro di base, possibile combinazione con asse rotante sull’asse verticale

ROBOT SCARA
Robot a 4 assi e 4 gradi di libertà, braccio e carico utile variabile, veloce, preciso e flessibile
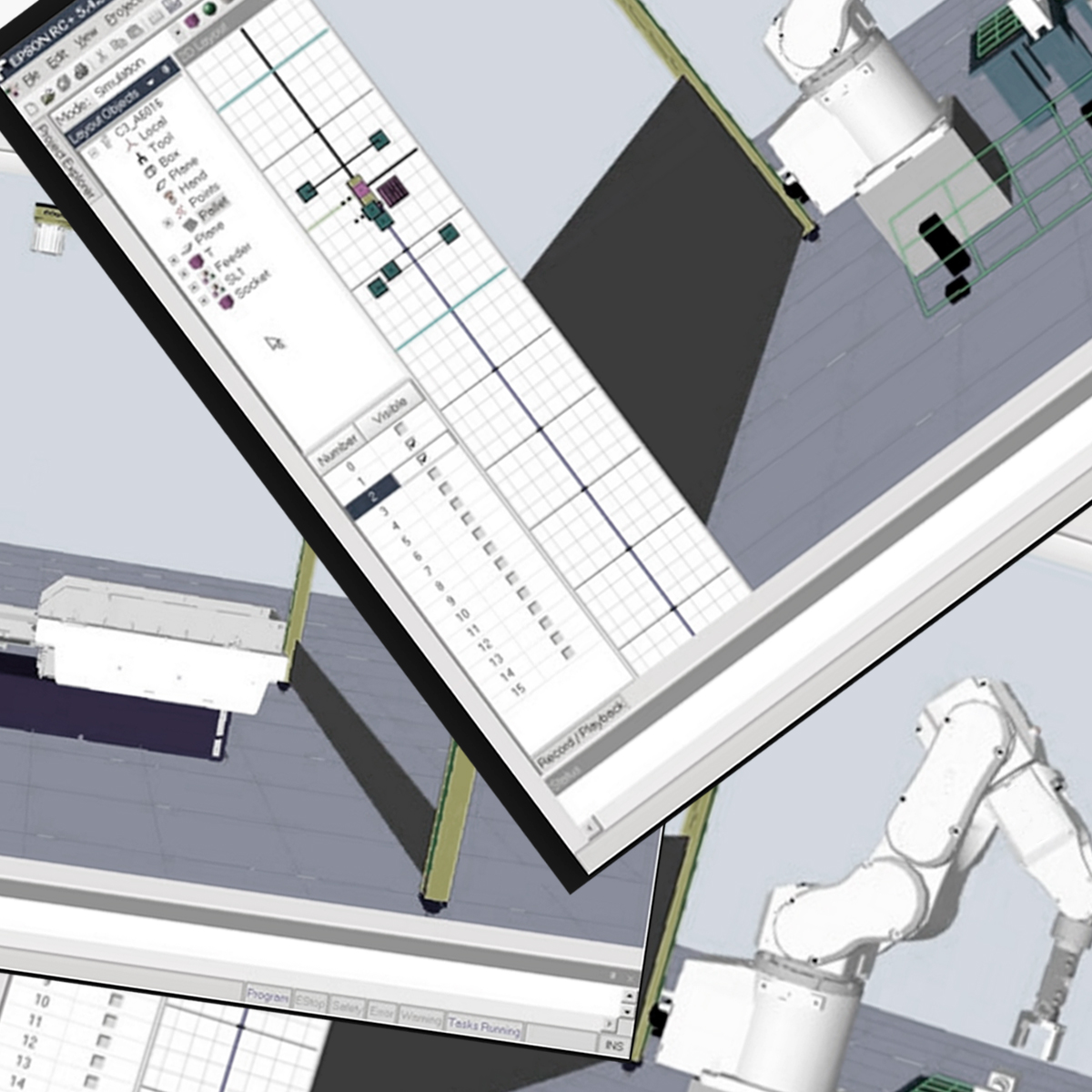
SOFTWARE
IAI, EPSON, NACHI e TM, ciascuna a suo modo, hanno sviluppato un’architettura software semplice, intuitiva, facilmente riconfigurabile, completa e flessibile

UNITÀ DI CONTROLLO
Ogni robot/manipolatore è gestito nel moto da un’unità di controllo, compatta e potente, progettata per lavorare come sistema stand alone o integrata, modalità posizionamento semplice o programma completo per IAI, solo programmabile per EPSON, NACHI e TM